TL;DR
- Medium
- Avg 12 hours a week
- Cool projects!
What is AI for Robotics?
AI for Robotics specializes in localization (where are you?), mapping (what is around you?) search (where is the thing you’re looking for?) and control (what do you do to get to your goal?)
Graded course material
- 4 projects
- 13% each
- 1 “mini-project”
- 10% each
- 6 “problem sets”
- Short coding assignments
- 3% each
- 2 Exams
- Extra-credit!
Projects
Kalman Filter : Meteorites
Kalman Filtering is a way to predict the future locations of objects, given their past locations
You will use:
- Linear algebra
- Numpy
- Trigonometry
The Kalman Filters lecture videos are incredibly helpful here, make sure to watch them all
If you want to get started early I believe this free Udacity course has most of the same material
Particle Filter : Mars Glider
You will guide a glider around a map using particle filters
Particle filters is equivalent to “crowd sourcing” a location of an object (lecture videos)
You generate a bunch of points and slowly begin to choose the most likely points
You will use:
- Linear algebra
- Statistics
- Trigonometry
- Creativity
I say you’ll use “creativity” because you have to come up with a lot of the specifics yourself, i.e. how many points? What noise level of measurements will you allow? How will you determine an appropriate error? etc. etc.
My advice is to watch the lecture videos once through before you even start coding or reading the spec, to get a high-level understanding first
I only got 63/100 on this project but still managed to get a B in the course (start early!)
Search: Warehouse
Here you will program a robot to search the room optimally for boxes
You will use:
- Cartesian plane
- Planning
- For-loops
This project isn’t too bad, but it takes time
Make sure to understand what your robot should do on paper, before programming
The lecture videos are almost verbatim what you need (lecture videos)
SLAM : Indiana Drones
SLAM stands for “Simultaneous Location and Mapping”, meaning you find out where you are in the world, while you map out what’s in the world
There are a few things you should know going into this (from the lecture videos):
- Linear algebra
- Numpy
- Trigonometry
It’s a bit difficult to understand the linear algebra needed for this project, so I would definitely suggest taking some extra time before you start coding, to do an example out by hand like Prof. Thrun does in the videos.
That being said, it is by far the coolest project, because this actually has applications in the real world.
Mini-project
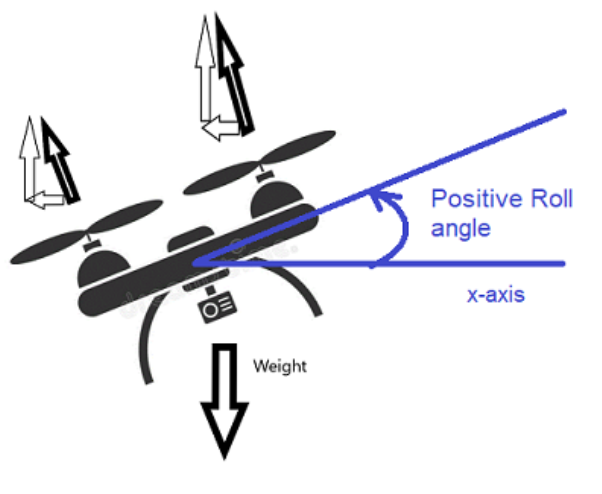
Drone PID Controller
Here you will be controlling a drone’s tilt (i.e. roll angle) and thrust to get it to the goal
PID is a fancy term which stands for “Proportional-Integral-Derivative”
Essentially what it means that when you add a little bit of thrust or tilt, that little bit will affect the next amount of thrust or tilt you give
This project follows the lecture videos very closely, which is nice
You just have to fill out a couple of formulas in code, but they give you the formulas in the videos
You can also earn extra credit on this project! Which I did by getting an extra 0.22 percent on it 😎
Problem sets
Problem sets are short coding assignments you do while following along in a lecture video
They are quite literally “copying” (i.e. transcribing) code from the lecture videos into your python file and submitting it
So very easy and informative at the same time
Exams
The exams are great:
- 5% of final grade (midterm) or 10% of final grade(final)
- 15 questions (midterm) or 30 questions (final)
- You get two tries for each exam!
- Best score is kept
The exams together are worth roughly 1 project
It’s easy points, so study up and get that good grade!
Extra credit!
Yeah this class is great, here are all the ways you can get extra credit:
- Participate in bi-weekly “Hardware or research challenges”
- Excel in Piazza posts and helpfulness
- Get extra points on projects
I personally did not get extra credit (except for that one project where I got 0.22 points of extra credit 😎)
But it is great that they offer the option
Grade breakdown
- Projects:
- Kalman Filters: Meteorites – 95%
- Particle Filter: Mars Glider – 63%
- Search: Warehouse – 82%
- SLAM: Indiana drones – 88%
- Mini project:
- Drone PID controller – 100.22% 😎
- Problem sets – 100%
- Exams:
- Midterm – 80%
- Final – 64%
Final score: 85.56% or a B 😎


